
Software
Making Robotics Accessible with Open-Source Software Tools
CyderVis - CAN Bus Visualizer
CyderVis is a powerful cross-platform CAN bus visualizer, compatible with both Windows and Linux. It provides an intuitive GUI for monitoring, decoding, and transmitting CAN messages, making it ideal for robotic systems, automotive development, and other CAN-based applications.
Features:
Cross-platform support: Works seamlessly on both Windows and Linux.
Receive CAN messages: Capture raw CAN data or decode messages using a CAN database file (.dbc).
Real-time plotting: Visualize decoded messages and sensor data in real time.
Transmit CAN messages: Send messages either as a one-shot or at a configurable cycle time.
Links
Documentation → https://cyborg-dynamics-engineering.github.io/cyder-vis/
GitHub Repository → https://github.com/cyborg-dynamics-engineering/cyder-vis/
Note
CyderVis is an ongoing and open-source project. If you experience any issues, or wish to request features, please submit them on the Issues page of the CyderVis GitHub repository.
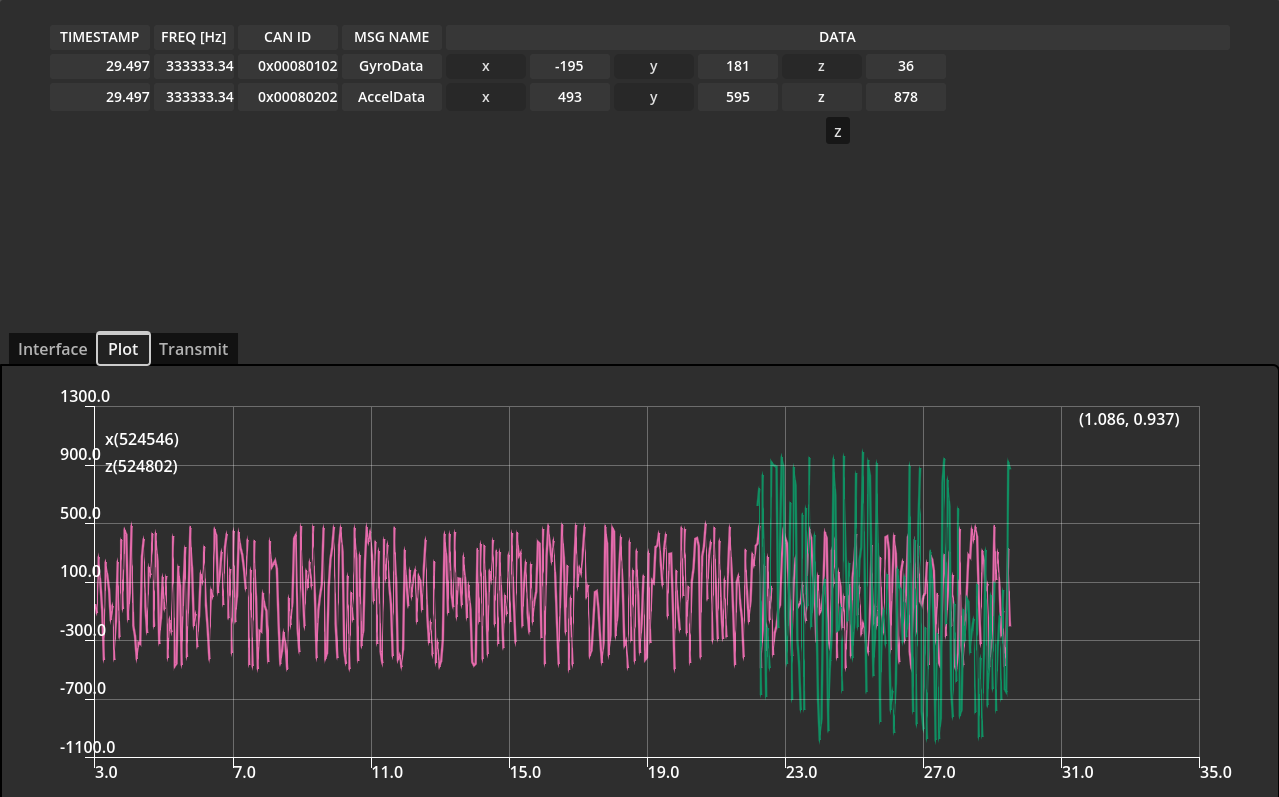
CyderStream Interface decoding Cyder IMU data
Windows CAN Utilities
Windows CAN utilities (win-can-utils) brings the power of Linux’s can-utils to Windows. Designed for robotic systems and CAN bus development, it replicates the core functionality of Linux can-utils on Windows, enabling the cross-platform operation of CyderVis.
Although still in the early stages, win-can-utils already provides essential tools for CAN bus interaction. It currently supports DSD TECH SH-C30A and SH-C31A USB-to-CAN adapters—affordable, widely available, and perfect for rapid prototyping and testing.
Whether you’re developing, debugging, or monitoring CAN networks on Windows, win-can-utils makes it simple to integrate and manage your CAN devices.
Features:
Command-line interaction: Control CAN devices directly from the Windows Command Prompt.
Driver support: Currently supports slcan devices including the DSD TECH SH-C30A and SH-C31A USB-to-CAN adapters.
canserver: Brings up CAN adapters and exposes them via Windows Pipes, allowing multiple processes to interact with the CAN bus through the one adapter. This architecture offers flexibility for future driver support and application development.
candump: Prints out CAN messages received by the canserver instance.
cansend: Sends CAN messages to the bus through a canserver instance
Links
GitHub Repository → https://github.com/cyborg-dynamics-engineering/win-can-utils
Releases → https://github.com/cyborg-dynamics-engineering/win-can-utils/releases
Note
win-can-utils is an ongoing and open-source project. If you experience any issues, or wish to request features, please submit them on the Issues page of the win-can-utils GitHub repository.
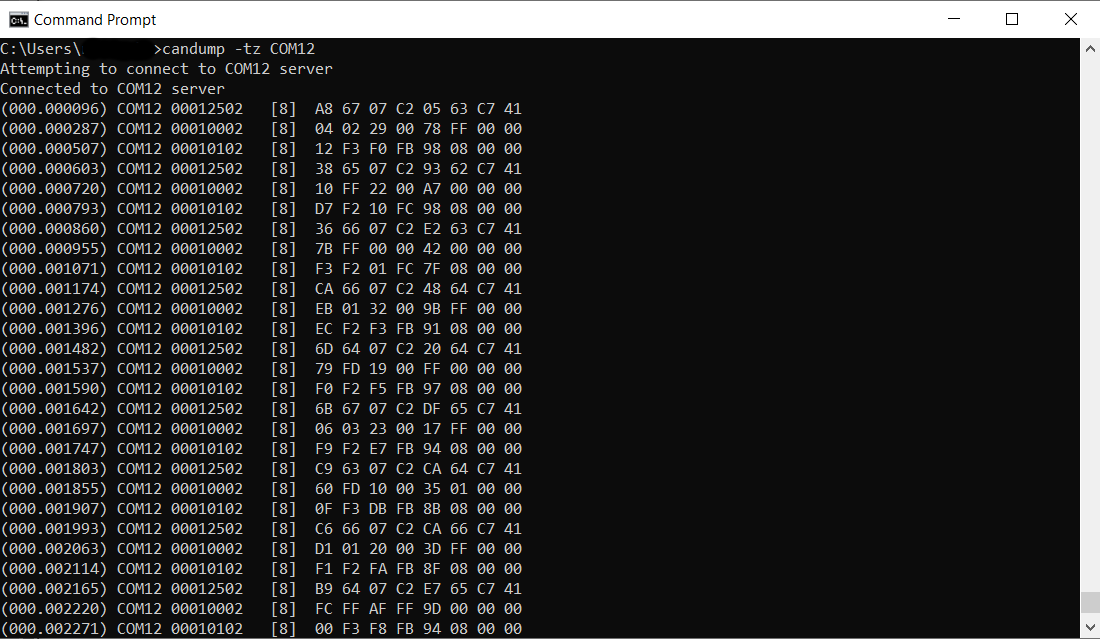
win-can-utils candump running in Windows CMD prompt.